A posicionador remoto para lince câmeras de acabamento é um complemento popular que permite o ajuste remoto de câmeras a partir do software FinishLynx. O posicionador remoto contém pequenos motores que permitem que a câmera incline, gire ou se movimente enquanto montada em um tripé. Em alguns casos - especialmente durante o armazenamento apertado - um motor pode quebrar e exigir reparos. Se você tiver um motor posicionador quebrado, a Lynx enviará a substituição e você poderá concluir o reparo conforme sua conveniência. Em vez de enviar seu posicionador de volta ao Lynx, você pode economizar tempo e dinheiro substituindo o(s) motor(es) por conta própria. O processo é muito simples. Depois de receber seus motores de substituição, siga as etapas abaixo.
Para começar, encontre uma área de trabalho plana, livre de desordem e bem iluminada.
Ferramentas necessárias:
- driver de soquete de 1/4″
- driver de soquete de 3/16″
- Chave de fenda Phillips média
Observação: Alguns posicionadores mais antigos exigirão um driver de soquete de 5/16″, pois porcas maiores foram usadas anteriormente.
Se você estiver substituindo apenas o Pan Motor, pule as etapas 5-6, 8.
Passo 1: Gire o Posicionador para que as pernas traseiras fiquem mais próximas de você. 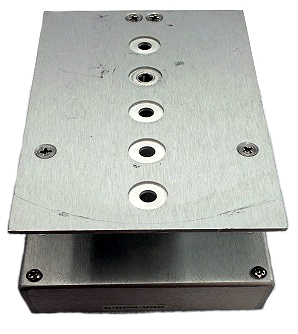
Passo 2: Comece removendo os 2 parafusos curtos das pernas traseiras da placa de montagem.
{kind=link}
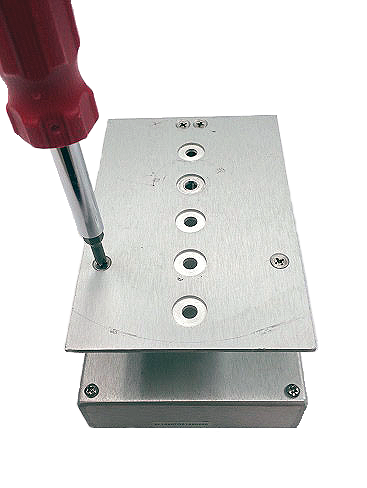
Passo 3: Remova os 4 parafusos da base do Posicionador.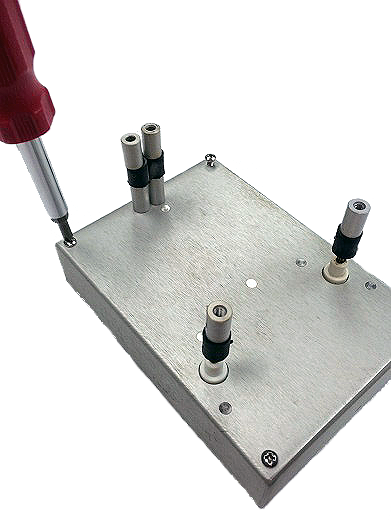
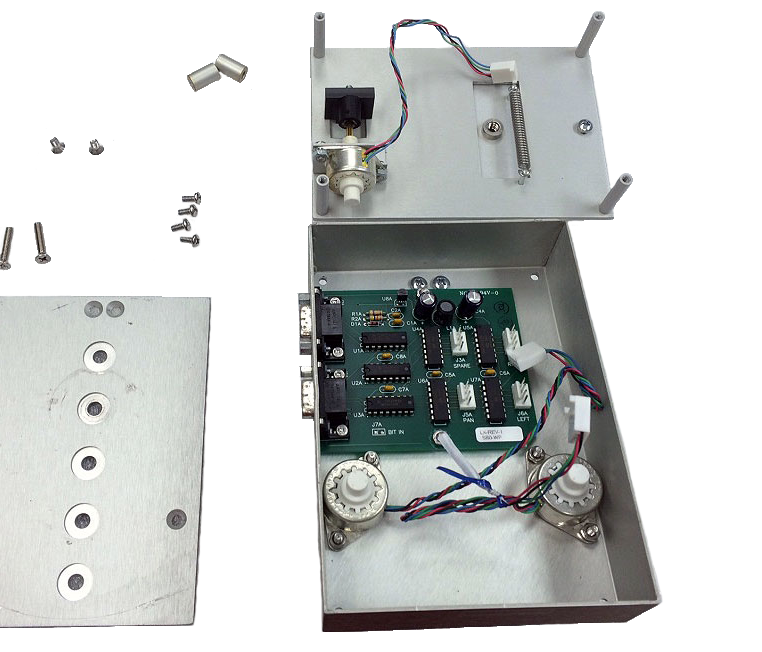
Passo 4: Vire o posicionador e remova a placa inferior. Desconecte os 3 cabos.
Passo 5: Usando o driver de soquete de 3/16″, remova os 4 parafusos jack das laterais dos plugues seriais.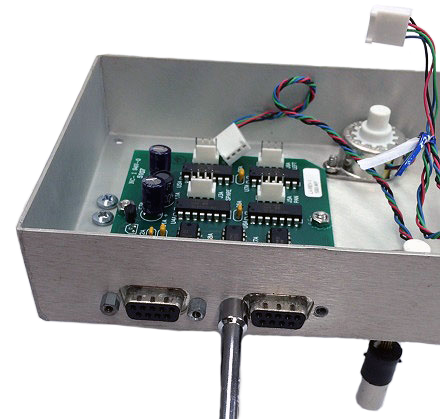
Passo 6: Usando o soquete de 1/4″, remova as 2 porcas da placa de circuito; remova a placa puxando para cima e afastando-a.
Passo 7: Remova as porcas e arruelas de qualquer motor quebrado. Transfira o suporte para o novo motor.
- Substitua o motor antigo pelo novo motor com os fios apontados para dentro.
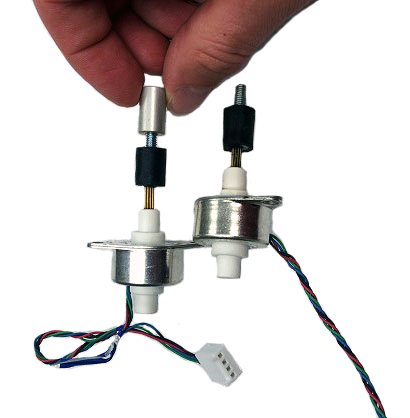
- Recoloque as arruelas e aperte as porcas.

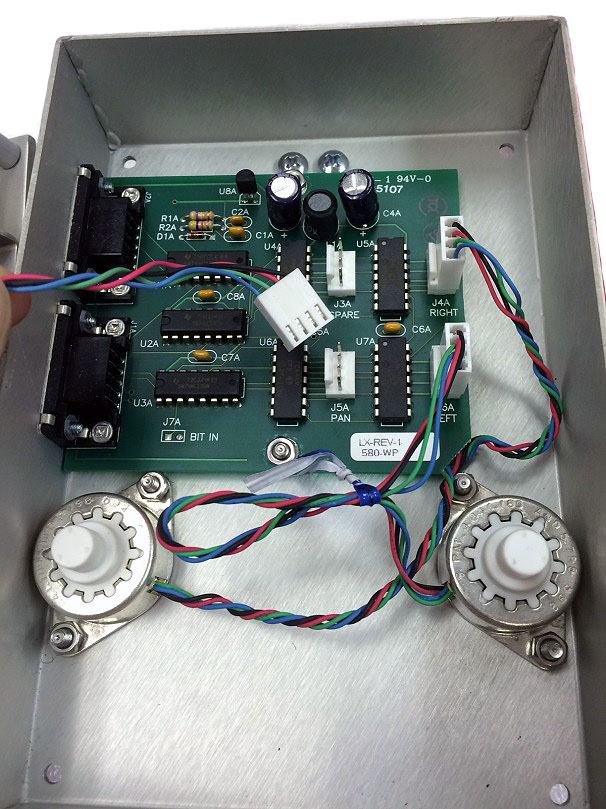
Passo 8: Substitua a placa de circuito.
- Aperte as porcas. (A porca de montagem do motor pode precisar ser ajustada para que a placa se encaixe.)
- Aperte os parafusos do macaco. (O aperto excessivo pode fazer com que os parafusos se quebrem.)
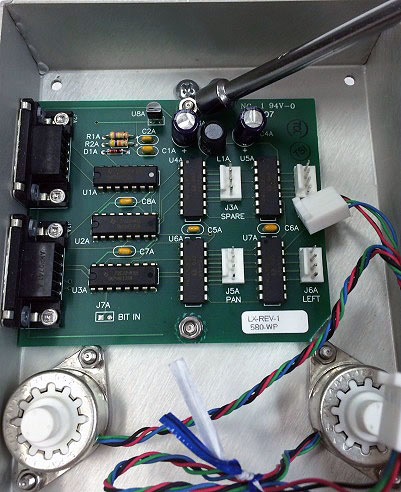
Passo 9: Conecte os motores na placa tomando nota das etiquetas e posições do motor - direita, esquerda, pan
Lembre-se também de que os motores estão de cabeça para baixo e, portanto, invertidos.
Passo 10: Substitua a placa inferior com o motor da panela para trás.
Passo 11: Vire o posicionador e aperte os 4 parafusos na base.
- Aperte os dois longo parafusos no frente pernas da placa de montagem.
- Aperte os dois baixo parafusos no em caminho duplo pernas da placa de montagem.
Se precisar de ajuda adicional, entre em contato com o suporte técnico: 978-556-9780 ou support@finishlynx.com